Lab 4 - Zastosowanie ROS’a w robotyce
Modelowanie i sterowanie robotów - laboratorium
Lab 4 - Zastosowanie ROS’a w robotyce
Politechnika Poznańska
Instytut Robotyki i Inteligencji Maszynowej
![]()
Jakub Chudziński, Bartłomiej Kulecki
Instalacja potrzebnego oprogramowania
Na zajęciach będziemy pracować z ROS Jazzy Jalisco (bazującym na Ubuntu 24.04). Rekomendowane jest skorzystanie z dostarczonego i skonfigurowanego oprogramowania tworzącego tzw. kontener (Docker container). Instalacja jest opisana zarówno dla użytkowników Windowsa jak i Ubuntu. Na komputerach w laboratorium można pominąć proces instalacji i przejść do sekcji “Uruchomienie ROS’a”.
Ubuntu

- Pobierz Docker Engine, instrukcja: https://docs.docker.com/engine/install/ubuntu/#install-using-the-repository
- Opcjonalnie, możesz wykonać kroki poinstalacyjne dla Docker Engine
przedstawione na stronie:
https://docs.docker.com/engine/install/linux-postinstall/ - Pobierz i zainstaluj Visual Studio Code poleceniem w Terminalu:
sudo apt-get install code - Otwórz VS Code i zainstaluj rozszerzenie (skrót CTRL+SHIFT+X) o nazwie “Remote Development”
Windows 
- Pobierz XLaunch Server ze strony https://sourceforge.net/projects/vcxsrv/ i zainstaluj.
- Pobierz Docker Desktop ze strony https://docs.docker.com/desktop/install/windows-install/ i zainstaluj.
- Pobierz Visual Studio Code ze strony https://code.visualstudio.com/download i zainstaluj.
- Otwórz VS Code i zainstaluj rozszerzenie (skrót CTRL+SHIFT+X) o nazwie “Remote Development”.
- Pobierz repozytorium:
- jako zip
i rozpakuj w wybranej lokalizacji na dysku jako
ros2_ws_misr
- LUB w wierszu polecenia za pomocą komendy:
git clone -b jazzy-Windows https://github.com/LRMPUT/ros2_ws_misr.git
Uruchomienie ROS’a (Docker)
Ubuntu (lab)
Otwórz Terminal i uruchom Docker Engine poleceniem
sudo systemctl start docker(może nie być konieczne).W Terminalu uruchom polecenie (skopiuj całą komendę):
test -d ~/ros2_ws_misr/.git && (cd ~/ros2_ws_misr && git fetch && git reset --hard origin/jazzy) || (cd ~ && git clone -b jazzy https://github.com/LRMPUT/ros2_ws_misr.git) && xhost +local: && code ~/ros2_ws_misrW VS Code:
- naciśnij przycisk widoczny w powiadomieniu w prawym dolnym rogu
Reopen in Container - LUB naciśnij
F1i wpisz “Reopen in…”, wybierz"Dev Containers: Rebuild and Reopen in Container", i kliknij Enter
- naciśnij przycisk widoczny w powiadomieniu w prawym dolnym rogu
Poczekaj na pobranie i instalację potrzebnego oprogramowania.
Windows
- Uruchom XLaunch Server z domyślnymi ustawieniami.
- Uruchom Docker Desktop (pozostawiając w tle).
- Uruchom VS Code i otwórz folder
ros2_ws_misr. - W VS Code:
- naciśnij przycisk widoczny w powiadomieniu w prawym dolnym rogu
Reopen in Container - LUB naciśnij
F1i wpisz “Reopen in…”, wybierz"Dev Containers: Rebuild and Reopen in Container", i kliknij Enter
- naciśnij przycisk widoczny w powiadomieniu w prawym dolnym rogu
- Poczekaj na pobranie i instalację potrzebnego oprogramowania.
Dla chętnych: instalacja i uruchomienie na Ubuntu bez Dockera
Instalacja bez Dockera na systemie Ubuntu 24.04
Oprócz rekomendowanej instalacji oprogramowania
z wykorzystaniem Dockera, można również zastosować
podejście, w którym instaluje się system operacyjny Ubuntu równolegle
(obok) systemu Windows. Wówczas przy uruchamianiu komputera pojawia się
możliwość wyboru systemu, który chcemy włączyć.
UWAGA! Zachowaj szczególną ostrożność przy instalacji
Ubuntu na dysku twardym, zapoznaj się dokładnie z dostępnymi w sieci
instrukcjami instalacji, tak aby nie usunąć przez przypadek Windowsa,
jeśli tego nie chcesz.
Wprowadzenie do ROS’a
Robot Operating System (ROS) to open-source’owe środowisko do tworzenia aplikacji dla robotów i systemów zrobotyzowanych. Dostarcza narzędzia do komunikacji między procesami, obsługi urządzeń (kamery, czujniki, sterowniki), modelowania oraz sterowania robotami. Jego architektura jest modułowa i rozproszona (SOA), co pozwala budować system z niezależnych komponentów, które można łatwo przenosić między projektami.
Programowanie w ROS najczęściej odbywa się w C++ lub Pythonie. C++ wykorzystywany jest zwykle w modułach wymagających wysokiej wydajności (np. sterowanie), natomiast Python sprawdza się przy szybkim prototypowaniu i przetwarzaniu danych, np. z kamer. Dużą zaletą ROS jest bogaty ekosystem gotowych pakietów tworzonych przez społeczność.
Środowisko ROS jest ściśle związane z systemami Linux (najczęściej Ubuntu). Znajomość terminala oraz języka angielskiego jest w praktyce niezbędna do pracy z dokumentacją i rozwiązywania problemów.
Istotnym elementem pracy w ROS jest możliwość równoległego korzystania z symulacji i realnego sprzętu. To samo oprogramowanie może działać zarówno w środowisku symulacyjnym, jak i na fizycznym robocie, co znacząco przyspiesza rozwój i testowanie systemu.
ROS (a obecnie szczególnie ROS 2) jest wykorzystywany nie tylko w edukacji i badaniach, ale również w zastosowaniach przemysłowych, m.in. w ramach inicjatywy ROS-Industrial.
Struktura funkcjonalna ROS’a
Robot Operating System jest zainstalowany w systemie (natywnie lub
wewnątrz kontenera) pod ścieżką /opt/ros/jazzy lub w
przypadku innych dystrybucji ROS’a:
/opt/ros/<ROS-DISTRO>.
⚠️ ⚠️ ⚠️ Otwierając nowy terminal należy zawsze przed
rozpoczęciem pracy wykonać komendę:
⚠️ ⚠️ ⚠️
source /opt/ros/jazzy/setup.bash
Komenda ta wskazuje potomnym procesom, gdzie jest zainstalowany ROS,
ustawia wymagane zmienne środowiskowe - po prostu umożliwia korzystanie
z ROS’a.
ROS ma architekturę modułową. Poszczególne węzły (które można interpretować jako procesy w systemie odpowiedzialne za różne zadania) komunikują się ze sobą korzystając ze standardowych dla ROSa sposobów takich jak topic i service.
Moduł (ang. module, package)
Moduł to zbiór procesów realizujących określone zadanie. Na moduł może składać się jeden lub więcej węzłów (ang. node). Przykładowym modułem może być aplikacja do przetwarzania danych biomedycznych, w której jeden z węzłów odpowiada za odbiór danych z różnych czujników, a drugi za przetwarzanie ich na komendy sterujące robotem.
Aby uruchomić pojedyczny węzeł z danego modułu wykorzystujemy komendę:
ros2 run [package_name] [node_name]🛠️ Zadanie 1.1: Wykonaj poniższe polecenie, aby uruchomić przykładowy, domyślnie zainstalowany węzeł:
ros2 run turtlesim turtlesim_node
Węzeł (ang. node)
Proces pełniący określone zadanie. W obrębie modułu może być utworzone wiele współpracujących węzłów.
🛠️ Zadanie 1.2: Otwórz nowe okno terminala
(CTRL+SHIFT+`), zainicjalizuj w nim ROS’a (komenda
source /opt/ros/jazzy/setup.bash) i wyświetl listę
aktywnych węzłów poleceniem:
ros2 node listJeśli w terminalu jest uruchomiony proces, który blokuje to okno i chcemy go zakończyć, należy użyć skrótu CTRL+C
Temat (ang. topic)
Węzły mogą się komunikować za pomocą tematów. Jeden z węzłów jest nazywany publikującym (ang. publisher lub advertiser), a drugi subskrybującym (ang. subscriber). Węzeł publikujący przesyła wiadomości na danym temacie i mogą być one odbierane przez wielu subskrybentów.
Jeśli węzeł turtlesim_node jest wyłączony, uruchom
go.
🛠️ Zadanie 1.3: W nowym oknie terminala uruchom kolejny węzeł poleceniem:
ros2 run turtlesim turtle_teleop_keyTen węzeł dodaje możliwość sterowania symulowanym żółwiem za pomocą strzałek klawiatury. Aby sterować żółwiem, kliknij najpierw na okno terminala z tym węzłem.
🛠️ Zadanie 1.4: W nowym oknie terminala wyświetl listę dostępnych tematów poleceniem:
ros2 topic list🛠️ Zadanie 1.5: Wyświetl dane publikowane na temacie
/turtle1/cmd_vel poniższym poleceniem. Poruszaj żółwiem i
zaobserwuj publikowane dane.
ros2 topic echo /turtle1/cmd_velWiadomość (ang. message)
Węzły przekazują pomiędzy sobą wiadomości, mogą to być np. przetworzone dane z czujnika.
🛠️ Zadanie 1.6: Wyświetl typ danych publikowanych na
temacie /turtle1/cmd_vel.
ros2 topic type /turtle1/cmd_vel🛠️ Zadanie 1.7: Aby wyświetlić informację o typie tej wiadomości, wykonaj polecenie:
ros2 interface show geometry_msgs/msg/TwistZazwyczaj wiadomości publikujemy wewnątrz zaprogramowanego węzła, ale istnieje również możliwość publikowania wiadomości z poziomu okna terminala:
ros2 topic pub [topic_name] [msg_type] [args]🛠️ Zadanie 1.8: Wykonaj poniższe polecenie, aby wysterować symulowanego żółwia:
ros2 topic pub -1 /turtle1/cmd_vel geometry_msgs/msg/Twist 'linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0
'Możesz jednocześnie publikować dane z wielu okien lub wielu węzłów. Spróbuj publikować powyższą komendę i jednocześnie sterować żółwiem za pomocą klawiatury.
Bibliotekami, które implementują powyższe funkcjonalności są
rclpy dla Pythona oraz rclcpp dla C++,
umożliwiają one np. tworzenie węzłów, czy dodawanie
subskrybentów/publikujących.
Nauka ROS’a - tutoriale 🐢
Bardzo dobrym sposobem aby poznać ROS 2 są tutoriale z oficjalnej dokumentacji ROS’a. Podstawy są zaprezentowane na bazie prostego narzędzia jakim jest turtlesim.
Przykłady projektów w ROS’ie 🔥
Poniżej przedstawiono wybrane, popularne pakiety i zastosowania ROS 2, które pokazują, jak szerokie możliwości daje ten ekosystem – od robotów mobilnych, przez manipulatory, po symulację i wizję komputerową.
| Moduł | Przeznaczenie | Opis |
|---|---|---|
| MoveIt 2 | Planowanie ruchu | Framework do planowania trajektorii dla manipulatorów i robotów mobilnych (kinematyka, kolizje, planowanie ścieżek). |
| Navigation2 | Nawigacja robotów mobilnych | Stos do autonomicznej nawigacji (mapowanie, lokalizacja, planowanie trasy, omijanie przeszkód). |
| Gazebo / Ignition Gazebo | Symulacja robotów | Zaawansowane środowisko symulacyjne do testowania robotów bez dostępu do sprzętu. |
| OpenCV + pakiety ROS 2 | Wizja komputerowa | Przetwarzanie obrazu z kamer: detekcja obiektów, śledzenie, rozpoznawanie. |
| RViz2 | Wizualizacja danych | Narzędzie do wizualizacji czujników, trajektorii, map i modeli robotów w 3D. |
| tf2 | Transformacje układów współrzędnych | Zarządzanie relacjami przestrzennymi między układami odniesienia (np. kamera–robot–świat). |
| micro-ROS | Integracja z mikrokontrolerami | Umożliwia uruchamianie ROS 2 na systemach wbudowanych (np. STM32, ESP32). |
| Universal Robots ROS2 Driver | Sterowanie manipulatorami | Integracja przemysłowych robotów z ROS 2 (planowanie ruchu, sterowanie, diagnostyka). |
Tworzenie własnych programów w ROS’ie 🤖
Podstawową jednostką oprogramowania obejmującą kod źródłowy, pliki systemu kompilacji, dokumentację, testy i inne powiązane zasoby jest paczka/pakiet (ang. package). Może zawierać jeden lub wiele węzłów, bibliotek lub zasobów. Paczki w ROS’ie mogą być zainstalowane w różnych obszarach roboczych (ang. workspace):
- Główny obszar roboczy ROS 2 („underlay”) – przechowuje
globalnie zainstalowane pakiety (lokalizacja
/opt/ros/jazzy/*) - Lokalne obszary robocze („overlay”) – miejsce dla rozwijanych (lokalnych) pakietów.
W głównym obszarze roboczym znajdują się prekompilowane, oficjalne
pakiety binarne dostarczane przez Open Robotics dla wybranej dystrybucji
ROS 2 (np. Humble, Jazzy) instalowane za pomocą narzędzia
apt. Jeśli chcemy utworzyć własną paczkę lub pobrać paczkę
innego autora np. z GitHub’a, to ich miejsce docelowe to lokalny
workspace.
Zazwyczaj lokalny workspace to katalog ~/ros2_ws (jednak
nazwa i lokalizacja nie ma znaczenia). Ma on określoną strukturę
podkatalogów:
src/– zawiera kod źródłowy pakietów ROS 2 (zarówno własnych, jak i sklonowanych),build/– przechowuje pośrednie pliki kompilacji,install/– przechowuje pliki wykonywalne, biblioteki i skrypty instalacyjne,log/– zawiera logi z kompilacji, uruchomień i testów.
🛠️ Zadanie 2.0: Uruchom terminal i przejdź do
katalogu ~/ros2_ws, zapoznaj się z jego strukturą. Jest to
Twoje środowisko pracy z ROS’em. Wyświetl jego zawartość korzystając z
komendy ls, następnie przejdź do folderu (komenda
cd) src i ponownie wyświetl zawartość tego
katalogu. Czy w Twoim workspace znajdują się jakieś paczki? Jeśli tak,
to jak się nazywają?
UWAGA 1: Katalogi
build,install,logpowstają w workspace po pierwszym budowaniu (kompilacji).
UWAGA 2: Wpisując nazwę docelowego folderu, warto wykorzystywać auto-uzupełnianie nazw po wciśnięciu klawisza TAB.
🛠️ Zadanie 2.1: Utwórz własną paczkę. Przejdź do
katalogu ~/ros2_ws, ustaw zmienne środowiskowe komendą
source /opt/ros/jazzy/setup.bash. Następnie przejdź do
katalogu src i utwórz paczkę o własnej nazwie (imię i
nazwisko / inicjały), np. jank_pkg:
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_python --license Apache-2.0 --node-name dist_node jank_pkgKomenda ta tworzy paczkę dedykowaną do aplikacji w języku Python.
Podając argument --node-name automatycznie utworzony został
plik dist_node.py i dodany został węzeł
dist_node.
🛠️ Zadanie 2.2: Zbuduj paczkę. W tym celu wykorzystać należy colcon – narzędzie ROS 2 do automatycznego budowania (kompilacji) paczek. Wykonaj poniższe komendy:
cd ~/ros2_ws
colcon build --symlink-install🛠️ Zadanie 2.3: Skonfiguruj lokalne środowisko ROSa za pomocą komendy:
source install/setup.bashNależy wykonać tę komendę w każdym nowym terminalu, w którym chcemy korzystać z lokalnie zainstalowanych (w workspace) paczek.
🛠️ Zadanie 2.4: Uruchom node za pomocą komendy:
ros2 run [package_name] dist_nodeW wyniku tej komendy powinien pojawić się tylko komunikat
Hi from [package_name]., ponieważ tylko to jest
zaimplementowane w utworzonym skrypcie.
🛠️ Zadanie 2.5: Edytuj skrypt
src/package_name/package_name/dist_node.py. Wklej poniższy
kod i zapoznaj się z nim.
import rclpy
from rclpy.node import Node
from turtlesim.msg import Pose
from std_msgs.msg import Float32
class TurtleTracker(Node):
def __init__(self):
super().__init__('dist_node')
# Initialize variables to keep track of the previous pose and total distance traveled
self.prev_pose = None
self.total_distance = 0.0
self.dist_msg = Float32()
# Create a subscription to the /turtle1/pose topic to receive pose updates
self.subscription = self.create_subscription(
Pose, '/turtle1/pose', self.pose_listener_callback, 10)
self.subscription # prevent unused variable warning
# Create a publisher to publish the total distance traveled on the 'travelled_distance' topic
self.distance_publisher = self.create_publisher(Float32, 'travelled_distance', 10)
# Create a timer to periodically publish the total distance traveled
self.timer = self.create_timer(timer_period_sec=0.2, callback=self.timer_callback)
# Callback function to handle incoming pose messages
def pose_listener_callback(self, pose_msg):
self.get_logger().info('I got new pose: x=%f, y=%f, theta=%f' % (pose_msg.x, pose_msg.y, pose_msg.theta))
if self.prev_pose is not None:
# Calculate the distance traveled since the last pose update and add it to the total distance
pass
self.prev_pose = pose_msg
# Callback function to publish the total distance traveled at regular intervals
def timer_callback(self):
self.dist_msg.data = float(self.total_distance)
self.distance_publisher.publish(self.dist_msg)
self.get_logger().info('Published total distance: %f' % self.dist_msg.data)
def main(args=None):
# Initialize the ROS 2 Python client library
rclpy.init(args=args)
# Create an instance of the TurtleTracker node
dist_node = TurtleTracker()
# Spin the node to keep it active and responsive to incoming messages and timer events
rclpy.spin(dist_node)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
dist_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()🛠️ Zadanie 2.6: Uruchom turtlesim_node,
otwórz drugi terminal i uruchom węzeł turtle_teleop_key. W
trzecim terminalu uruchom dist_node. W kolejnym terminalu
sprawdź listę tematów i nasłuchuj tematu
/travelled_distance podczas poruszania żółwiem.
🛠️ Zadanie 2.7: Uzupełnij kod w metodzie
pose_listener_callback tak aby do zmiennej
self.total_distance dodawać odległość przemierzoną od
ostatniej zmiany pozycji. Zapisz plik, zrestartuj węzeł
dist_node i ponownie przetestuj działanie węzła podczas
sterowania żółwiem za pomocą węzła turtle_teleop_key.
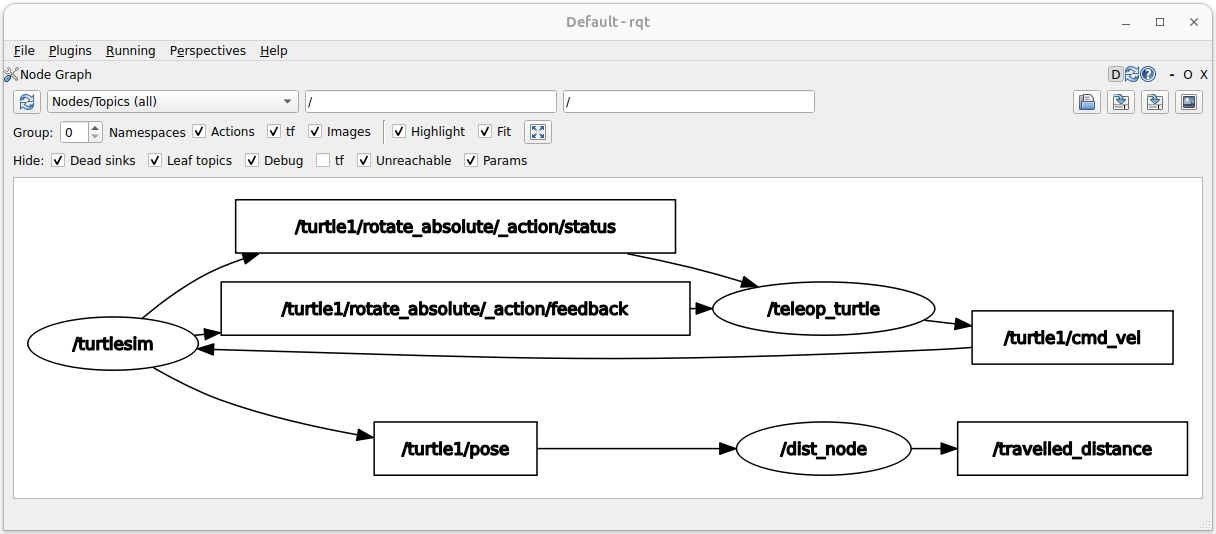
🛠️ Zadanie 2.8: Nie wyłączaj węzłów z poprzedniego
zadania. W nowym terminalu uruchom program rqt. Otwórz
zakładkę Plugins --> Introspection --> Node Graph i
sprawdź, jakie węzły (nodes) i tematy (topics) są aktywne oraz jakie są
między nimi połączenia:
Zadanie domowe
Jeśli nie udało Ci się wykonać wszystkich zadań podczas laboratorium, dokończ je w domu. Umiejętności z tych zajęć są konieczne podczas kolejnego laboratorium.